Advanced Sampling and Exploration Matlab Competition
Find a path from the centre to the boundary
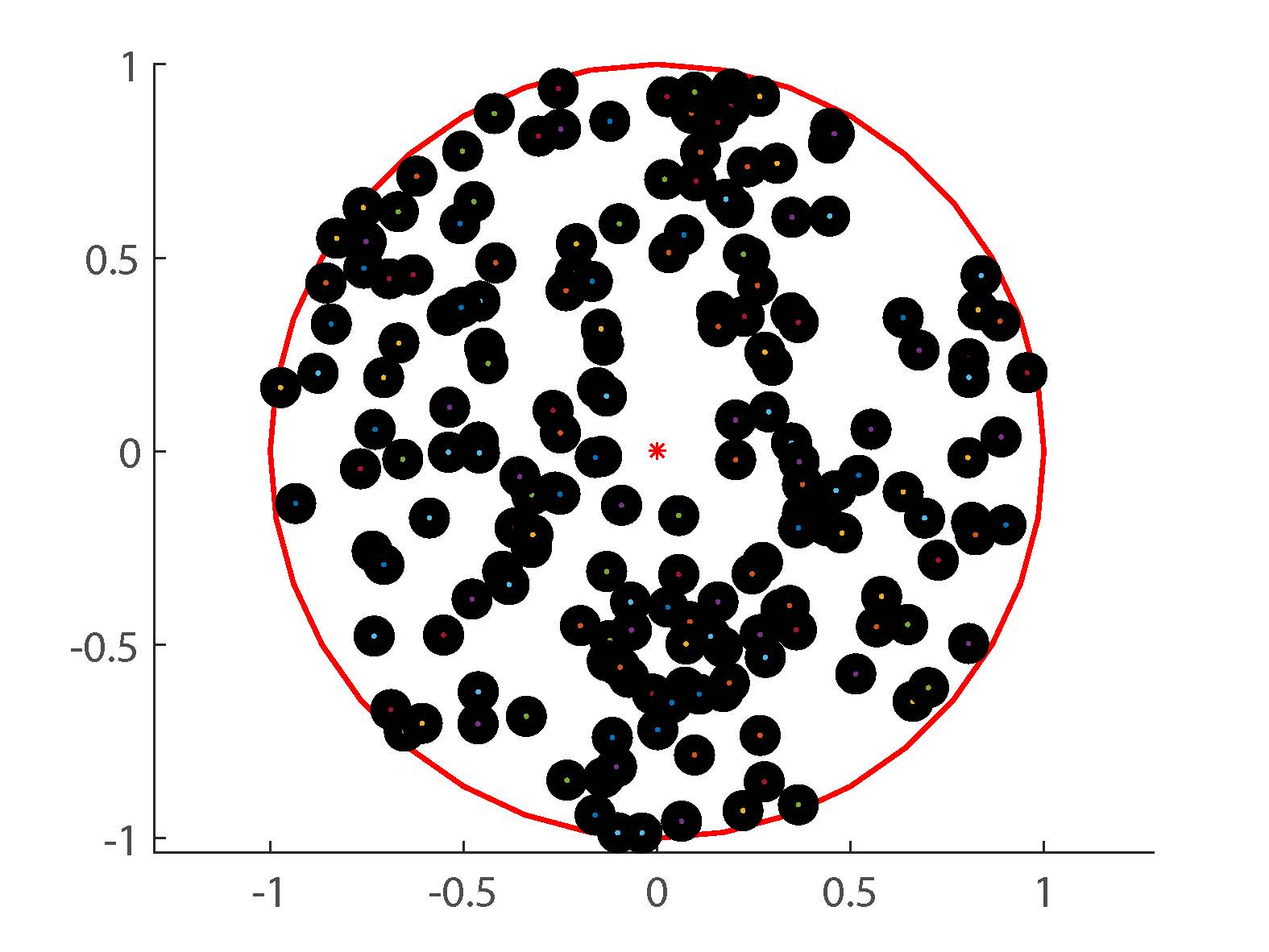
Imagine you are located in the centre of a unit disc that contains obstacles. You cannot see what is inside the disc, but you can activate a sensor (oracle) and learn if an obstacle exists at any given coordinates.
The challenge is to find a feasible path from the center to the outside boundary using the least number of oracle probes.
The competition is targeted at all students associated with ACEMS, but any interested student or group of students outside the centre can submit as well. The winner of the competition and the winning ACEMS entry will be announced at the workshop. The winning ACEMS entry (workshop participants included) will receive a $250 award.
Details of the rules of competition are given here (pdf).
| Matlab Programs (.m) |
Landscape data files (.txt) |
| BasicAlgorithm1.m | 100_0.1.txt |
| BasicAlgorithm2.m | 400_0.05.txt |
| landscapegeneration.m | 1000_0.04.txt |
| testalgorithm.m | 20_0.1.txt |
| oracle.m | 50_0.2.txt |
Winner
The winning entry is by the team of Kate Robinson Saunders, Tim Hyndman and PeterBraunsteins from the University of Melbourne.

Kate Robinson Saunders receives the ACEMS student Matlab competition price from Dirk Kroese
Landscapes
The 20 landscape instances that were used in the final comparison are given in the following zip file: instances.zip
Entries
The code and 8 entries used in the comparison can be found in the following zip file: code.zip